The Walking Manipulator (WM) is a product line enabling robotic on-orbit servicing and reconfiguration. Optionally the Walking Manipulator itself is reconfigurable to provide increased reliability and additional functions. It is designed to support launch loads and is fully compatible with the HOTDOCK connect/disconnect product.
-
Overview
Compared to a fixed or tracked manipulator, a walking manipulator offers a much wider range of motion over a spacecraft with a lower mass and higher reliability, depending on the number of fixation sites. With a very compact footprint, a WM can move payloads or carry payloads over large distances. With its end effector it can use cameras to inspect and tools to make repairs. These characteristics also enable cost effective assembly of large structures such as space telescopes.. The modularity of the WM allows maintenance and change out of failed limbs rather than the whole manipulator.
Product Family
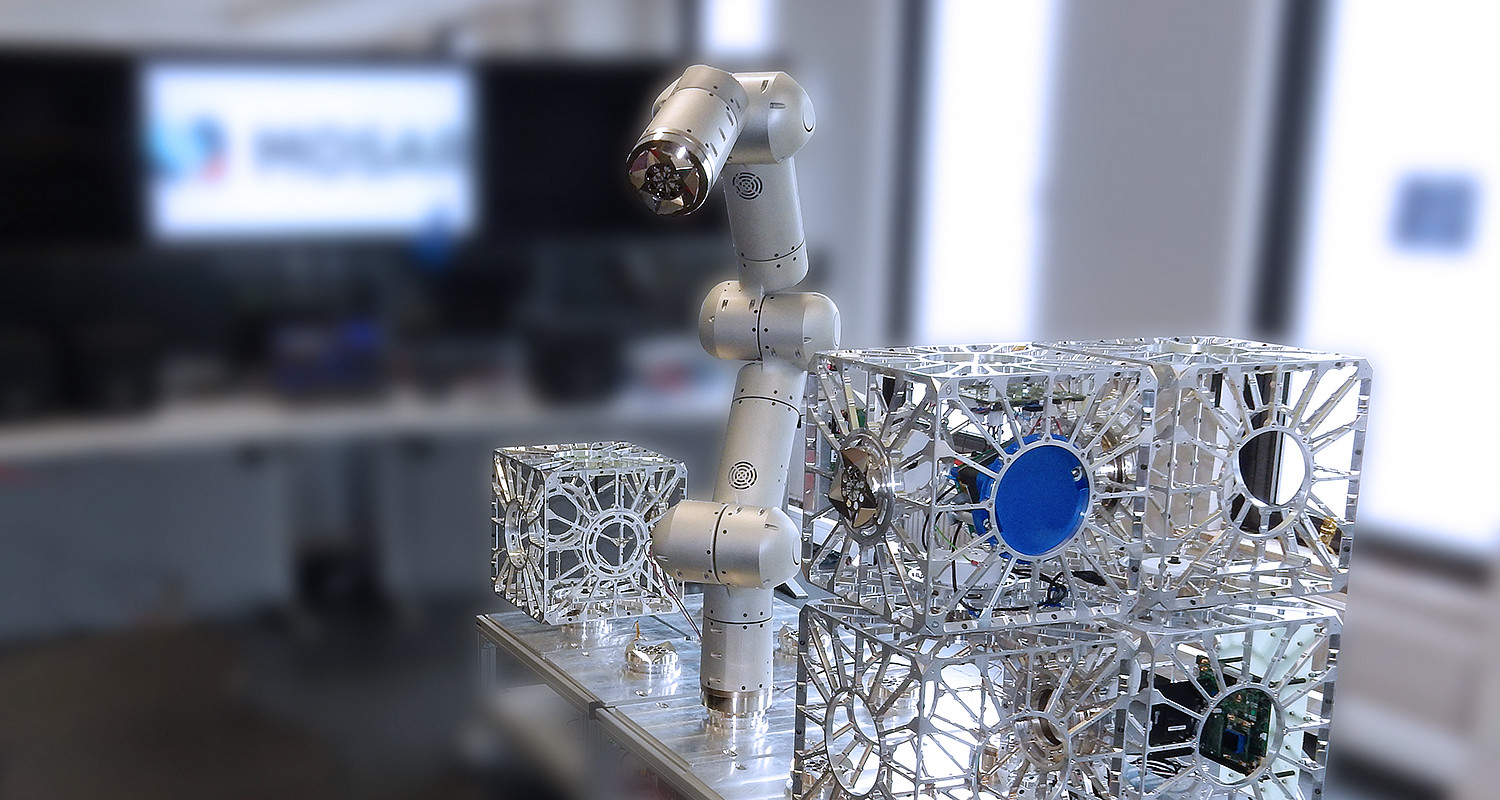
The Walking Manipulator is a seven joint symmetrical robotic arm, equipped with standard interconnects as end-effectors. Its joints consist of frameless hollow shaft motors coupled to harmonic drives. The product described in this document deals with the regular (baseline) version of the WM. However the number of joints can be adapted to user needs, as well as joints power (torque). Likewise limb lengths can be adapted to customer needs.
-
More information on the Product Sheet
-
Specifications Summary
Dimensions Payload handling Electrical Power Max length fully extended: 1,620mm • Maximum reach: 1,200mm • Limbs average diameter: 148.5mm • Mass: 32.5kg (inc. HOTDOCK® end effectors) GM: 10kg under 1g (without gravity compensation) • FM: 200kg in 0g Power consumption: 35W (stationary) to 200W (peak while operating max payload)