1. LUVMI-X
The “Lunar Volatiles Mobile Instrument” is a lunar rover reserved for the planetary robotics market. Built through a European Commission Horizon 2020 research programme, it is a mobile robot designed to explore the Moon, looking for resources such as water, that are necessary to sustain human life on the Moon. It is designed to withstand the extreme conditions on the Moon, and is capable of exploring ‘Permanently Shadowed Regions’ – areas of the Moon such as crater floors that never see the light of the sun and are perpetually in darkness. These are areas suspected to contain significant amounts of water ice; a resource that could be used to supply human habitats on the Moon with water and oxygen.
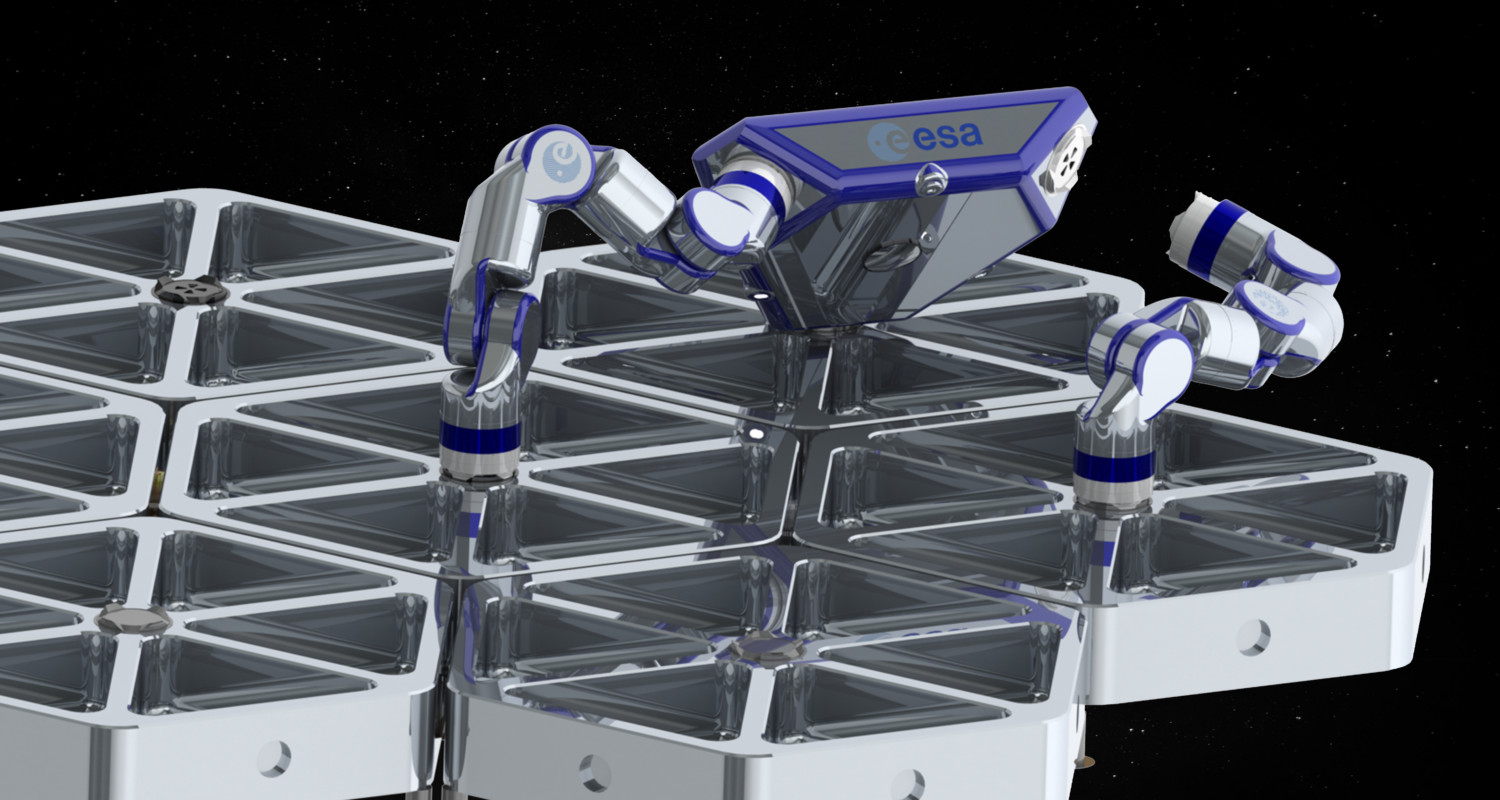
2. Walking Manipulator
The Walking Manipulator, so aptly and conveniently named, is one of the more recent developments at Space Applications Services belonging to the manipulator robot family. First built in the framework of the H2020 MOSAR project, it serves the orbital robotics market and seeks to address the demand for in-space manufacturing and assembly (ISMA) services such as satellite servicing, surface mobility and re-supply services. It is a repositionable symmetric walking robot that can capture, manipulate and position spacecraft modules, while being able to reposition itself on the spacecraft or directly on the modules. With the ineluctable de-orbit of the International Space Station in the coming decade, commercial space stations will flourish. ISMA will become all the more important, and the Walking Manipulator can be instrumental to answer the sustainability question that comes with increasing commercial activity in space for both manned and unmanned systems.
3. HOTDOCK®
With an increasing number of large structures in space, standardised interfaces enable a paradigm shift from monolithic spacecraft shipped in a single launcher, to multiple modular spacecraft elements shipped with several launches, and assembled in space. HOTDOCK® by Space Applications Services is a standard robotic mating interface that supports mechanical, data, power and thermal transfer. Built in an androgynous design on the mechanical and electrical connections, HOTDOCK® can mate seamlessly with other HOTDOCK® interfaces. It can accommodate a large variety of demanding on-orbit robotics applications such as modular spacecraft assembly and reconfiguration, or attachment points for manipulators. Failed modules can be conveniently replaced and payloads can be swapped using this standard robotic mating interface. In the domain of planetary robotics, it can also be applied for tools exchange, battery swapping, refuelling, trailer and convoy coupling.